
Autonomous Wheelchair
An autonomous, all-terrain wheelchair to enable those with limited control to experience locations that were not previously accessible
We have a number of robots that we use to test our algorithms, system development, and implementations.
An autonomous, all-terrain wheelchair to enable those with limited control to experience locations that were not previously accessible

An autonomous surface vessel used for bathymetric surveys and multi-agent simultaneous localization and mapping
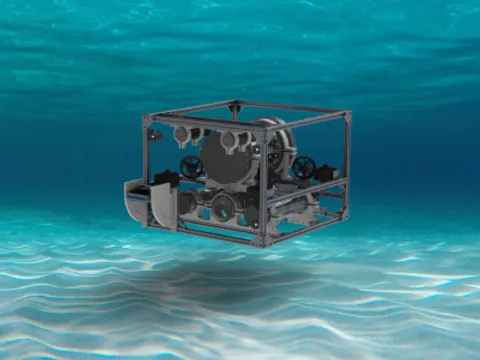
A fully autonomous underwater vehicle used to collect data and test novel mapping, localization, and planning algorithms.
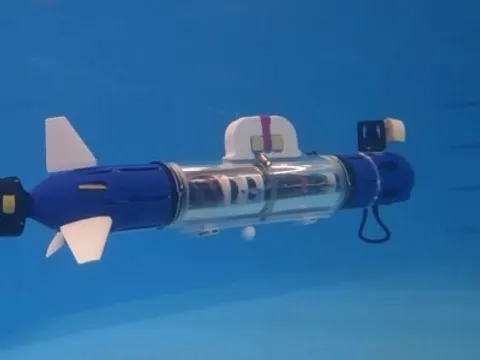
A simple unmanned underwater vehicle (UUV) used for new lab members to familiarize themselves with underwater robotics as well as a low cost option for multi-agent applications.

A platform to conduct surface marine missions where the focus is image collection. These images can be used to create mosaics or 3D maps of the surveyed area.

A vertical take-off and landing UAV for various data gathering applications requiring long-endurance flights.

A pair of industrial autonomous underwater vehicles used for active data collection and multi-agent simultaneous localization and mapping.